产品介绍¶
Autolabor PM1 是一款内外革新的机器人底盘,由全新材料打造,充满科幻感的外形,重新定义机器人底盘形态。

产品特性¶
机械采用独有结构设计,两动力驱动前轮与主动转向后轮配合的稳定三轮,运动更加灵活精准。

原地转向无侧滑,有一定的越障功能,载重能力更强,独特的结构使得产品能源利用率更高。

各单元采用模块化设计,便于产品迭代。
内部通信采用汽车级CAN协议,稳定可靠保障数据安全,电气控制系统模块化,便于扩展底盘功能。
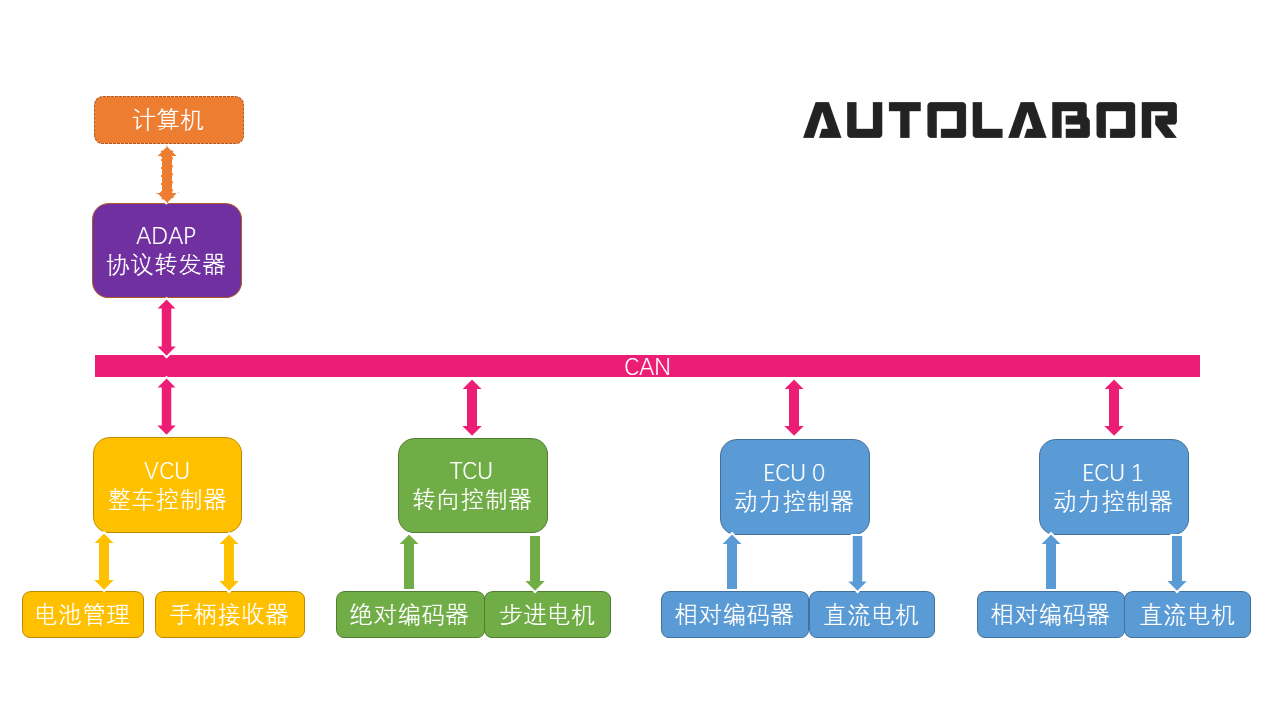
标准规格铅酸蓄电池,高精度电量统计,且提供数据查询接口。

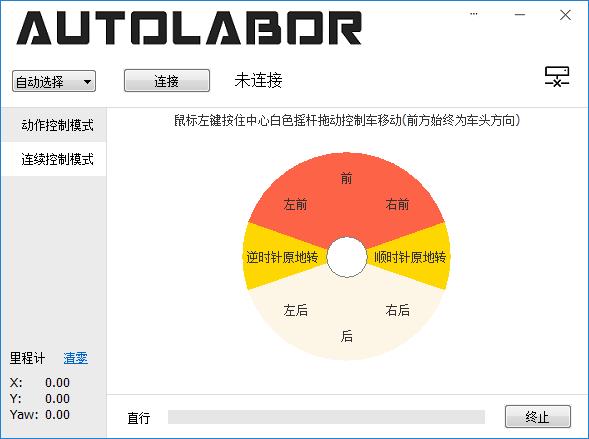
提供开机即用的可视化的控制软件,操作简单,可让机器人完成指定动作(直行/转弯指定的距离/角度),同时也可以操作方向盘自由控制。

代码全部开源,支持Windows/Linux多平台开发,支持多种语言开发(C++/C#),提供简单易用,方便灵活的控制接口,文档详细,提供大量示例代码,提供底盘ROS驱动。